Um novo sistema de broncoscópio robótico para navegação e biópsia de lesões pulmonares
pelo Instituto de Tecnologia de Pequim Press Co.

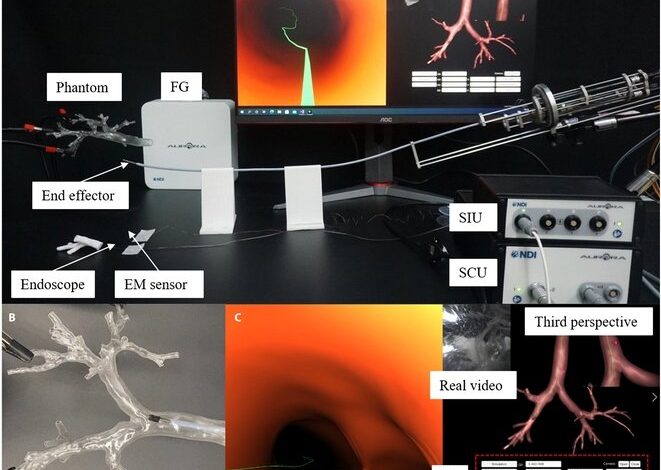
Roboticistas do Instituto de Tecnologia de Pequim propuseram um sistema de broncoscópio robótico visando a biópsia de lesões pulmonares. Crédito: Ciborgue e Sistemas Biônicos
Os cânceres são notoriamente conhecidos por sua alta taxa de mortalidade e aumento da incidência em todo o mundo. Entre eles, o câncer de pulmão é sem dúvida um dos mais devastadores. Segundo o World Cancer Research Fund International, o câncer de pulmão foi o segundo câncer mais comum em todo o mundo em 2020, com mais de 2,2 milhões de novos casos e 1,8 milhão de mortes.


No entanto, o pulmão Câncer, como outros tipos de câncer, é mais fácil de tratar se detectado anteriormente. “A taxa de sobrevida de 1 ano relatada para o estágio V é de apenas 15% a 19% em comparação com 81% a 85% para o estágio I, o que significa que a diferenciação precoce de nódulos pulmonares benignos e malignos pode efetivamente reduzir a mortalidade”, disse Xingguang Duan, cientista da Escola de Tecnologia Médica do Instituto de Tecnologia de Pequim.
Duan e seus colegas acreditam que o diagnóstico precoce do câncer de pulmão é essencial para o tratamento oportuno e melhores prognósticos. Para esse fim, eles criaram um novo sistema de broncoscópio robótico que pode acessar de forma não intrusiva a área de interesse dentro do pulmão para amostragem de lesões pulmonares minimamente invasivas, o padrão ouro de câncer de pulmão diagnósticos. Esta pesquisa foi publicada na revista Sistemas ciborgues e biônicos.
“Imagine inserir uma linha longa e fina na boca, através das vias aéreas, para cortar uma pequena parte da lesão de interesse dentro do pulmão. Depois disso, essa linha fina traz a amostra cortada de volta para um exame mais aprofundado para determinar se é benigno ou maligno, ” disseram os autores do estudo. “É para isso que o sistema de broncoscópio foi projetado. Nosso efetor final é como uma linha fina. Para fazer isso, essa linha deve primeiro ser fina o suficiente para cruzar a traquéia e os brônquios.”
“Além disso, deve ser capaz de dobrar, girar e transladar para navegar com flexibilidade na complexa rede de vias aéreas”, explicou Changsheng Li, autor correspondente desta pesquisa, da Escola de Engenharia Mecatrônica do Instituto de Tecnologia de Pequim.
“Outro problema é que você não pode ver o efetor final desta linha através do tórax do paciente. No entanto, para abordar com precisão a lesão de interesse, a posição e a pose do efetor final devem ser determinadas em tempo real”, disse o autores. Eles resolveram esse problema desenvolvendo um sistema de navegação, que conecta um endoscópio e dois sensores eletromagnéticos ao efetor final, o que permite o posicionamento online para navegação e fornece informações visuais para os médicos diagnosticarem e coletarem amostras.
O sistema de navegação também reconstrói um modelo virtual tridimensional baseado em tomografia computadorizada para planejamento de trajetória robótica, desde que haja a escolha da área alvo. Combinando o efetor final flexível e o sistema de navegaçãoo sistema de broncoscópio robótico pode atingir automaticamente a lesão-alvo e fornecer orientação visual intraoperatória para amostragem de biópsia.
Eles verificaram a viabilidade deste sistema de broncoscópio robótico por meio de um experimento de intervenção assistida por navegação ex vivo. “Durante o experimento, a posição exibida pela terceira perspectiva do endoscópio virtual é consistente com a posição da ponta do effector em relação ao fantasma das vias aéreas a partir da observação visual. A visualização do endoscópio virtual também corresponde ao vídeo real adquirido pelo módulo do endoscópio como esperado”, disse Li.
“Embora o sistema tenha alcançado um desempenho de broncoscopia promissor, como Aparelho médicoainda existem alguns problemas que limitam a aplicação clínica e promoção”, explicaram os autores. “Em primeiro lugar, a manobra mais conveniente é necessária para os cirurgiões aprenderem e usarem prontamente; Em segundo lugar, é necessária uma visão endoscópica de alta resolução; Finalmente, a calibração entre ambientes virtuais e reais ainda é demorada e hostil para o novato.”
No futuro, eles se concentrarão em minimizar o diâmetro do effector final e adotar módulos substituíveis para diversos requisitos cirúrgicos, explorando o controle das articulações para permitir ao robô um movimento mais flexível nas vias aéreas e adotando algoritmos de visão computacional para realizar a calibração automática e inteligente .
Mais Informações:
Xingguang Duan et al, um novo sistema robótico de broncoscópio para navegação e biópsia de lesões pulmonares, Sistemas ciborgues e biônicos (2023). DOI: 10.34133/cbsystems.0013
Fornecido pelo Instituto de Tecnologia de Pequim Press Co.
Citação: Um novo sistema de broncoscópio robótico para navegação e biópsia de lesões pulmonares (2023, 14 de abril) recuperado em 15 de abril de 2023 em https://medicalxpress.com/news/2023-04-robotic-bronchoscope-biopsy-pulmonary-lesions.html
Este documento está sujeito a direitos autorais. Além de qualquer negociação justa para fins de estudo ou pesquisa privada, nenhuma parte pode ser reproduzida sem a permissão por escrito. O conteúdo é fornecido apenas para fins informativos.